IKEA UTTER children's table
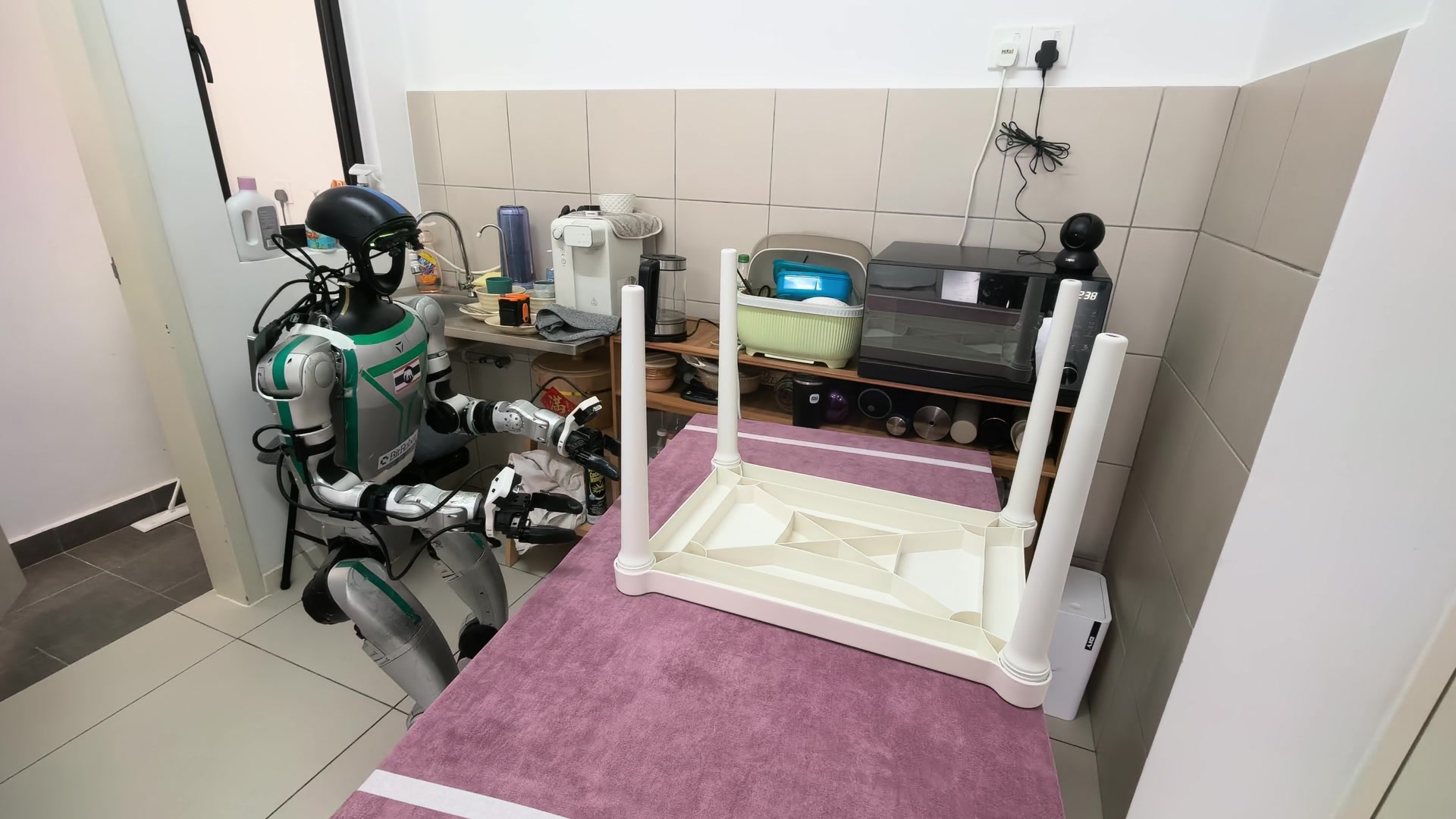
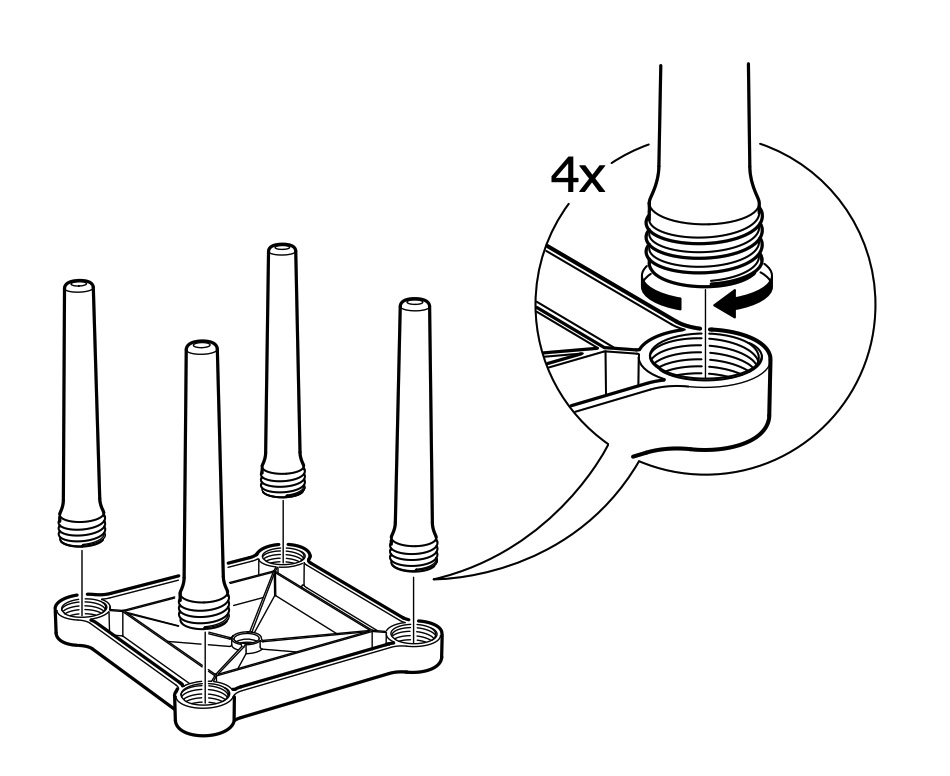
Same parts, every team. Twist-on legs, hand-tight only — the difficulty floor is bimanual coordination and 3D spatial reasoning, not fasteners.


Official IKEA UTTER · view on ikea.com →